多源融合导航
研究方向
室内外多源传感器融合导航定位
GNSS/INS松紧组合定位
GNSS/IMU/视觉/激光融合算法
移动机器人平台设计
代表性研究成果
| Name |
|---|
|
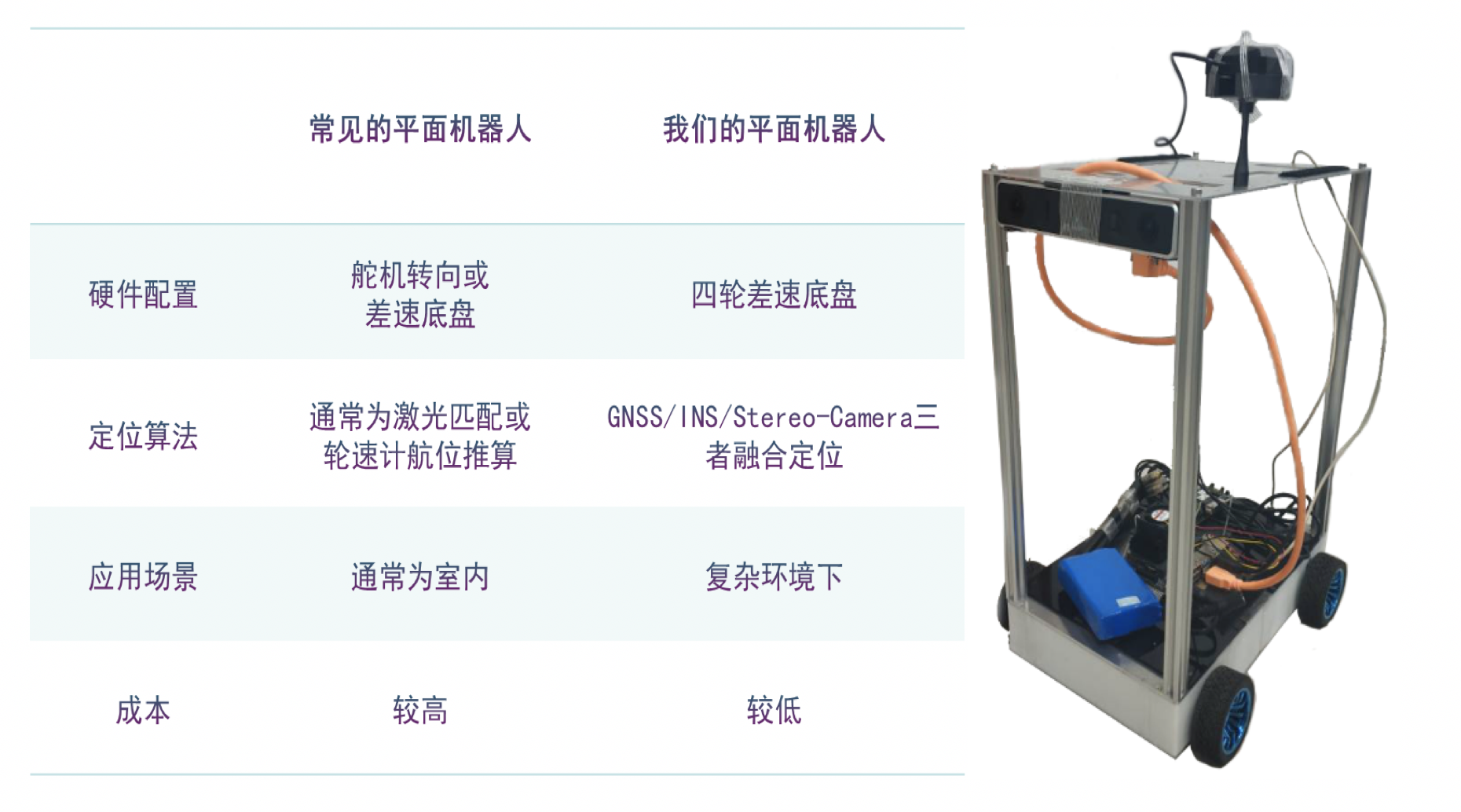
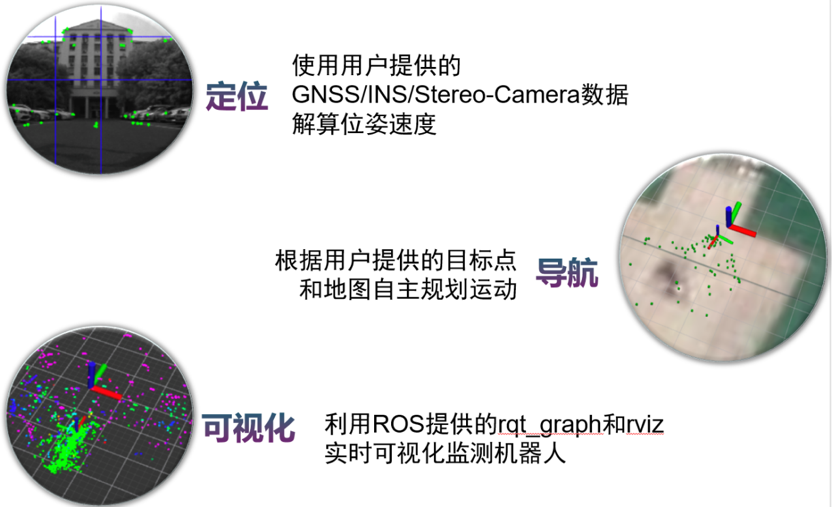
成果1:平面移动机器人平台 |
|
|

|

|
|
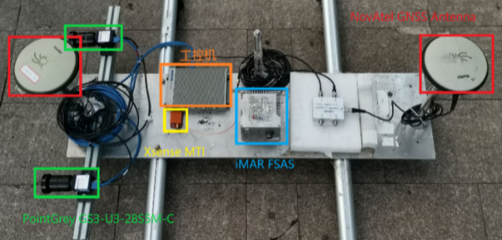
成果2:多源融合车载平台 |
|

|
|
|
廖健驰(2017级博士)

冯绍权(2020级博士)
王铉彬(2018级硕士)

王慧丹(2019级硕士)

李圣雨(2019级硕士)

周宇轩(2019级硕士)

王浩(2020级硕士)

何飞扬(2020级硕士)

宋宝山(2020级硕士)

常涵雨(2021级硕士)

汪世文(2021级硕士)

吴宗洲(2021级硕士)